
國吉さん (M2) の論文が掲載されました。おかげさまで査読は大変スムーズでした。
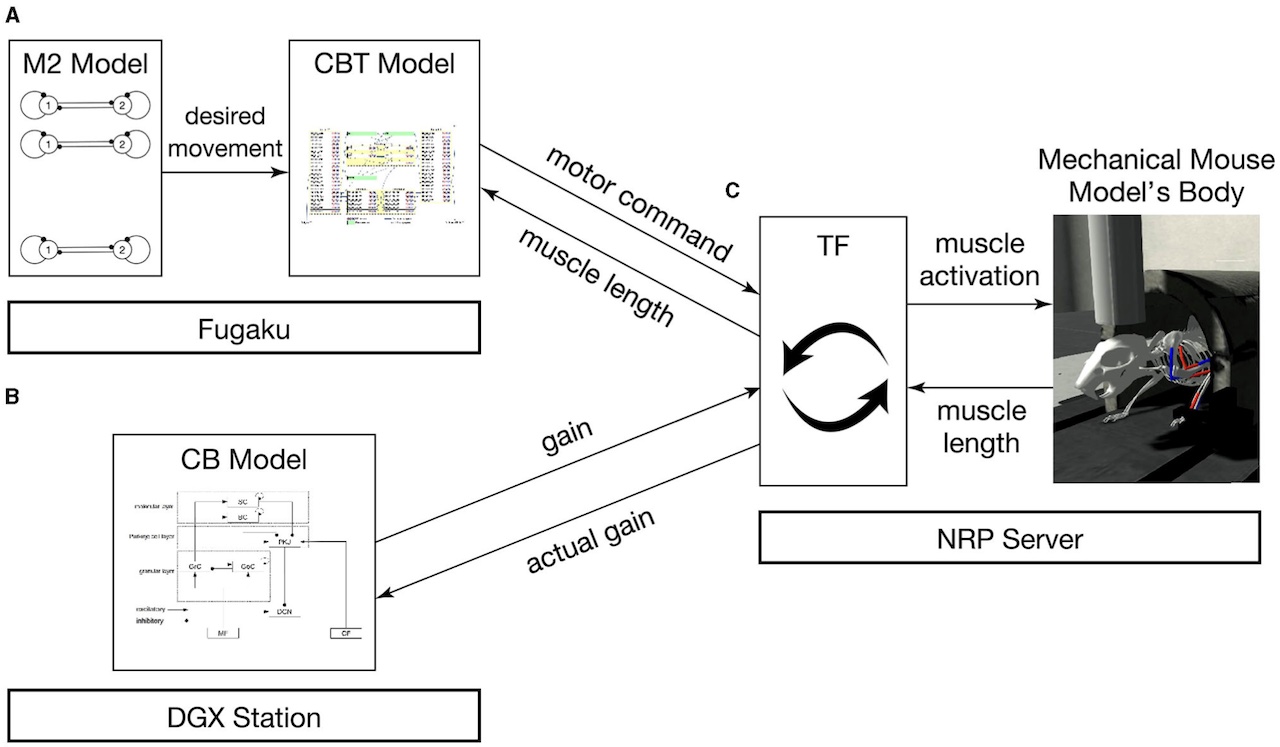
Kuniyoshi Y et al. Embodied bidirectional simulation of a spiking cortico-basal ganglia-cerebellar-thalamic brain model and a mouse musculoskeletal body model distributed across computers including the supercomputer Fugaku. Front. Neurorobot. 17:1269848 (2023)
https://www.frontiersin.org/articles/10.3389/fnbot.2023.1269848/full
日本の「富岳」成果創出加速プログラムと、EUのHuman Brain ProjectのNeurorobotics Platform (NRP)との国際共同研究です。
復活したのでもう書けますが、2019年度が終わったあたりで、我々の研究テーマは完全に枯渇していました。2019年度末にNEDOとポスト「京」萌芽とAMEDが終わって、それらの国プロのために全ての持ちネタを放出した (せざるを得なかった) からです。
そしてその頃はまだ、我々の主要な研究テーマは相変わらず小脳とGPUであり、発展性がありませんでした。さらに、発展させようとしても新しい技術や手法を身に付けていませんでした (余りに時間がないことを言い訳にして、身に付けようとすることを怠りました。反省すべき点です)。そのような閉塞的な状態で、2020–2022年度を過ごしたわけです。
発展させるべき方向性の一つが、今回論文になった脳と身体のシミュレーションでした。しかしそのためには
- 小脳以外の脳部位のモデル
- 自分で動かせる身体のモデル
- 脳と身体をつなぐためのフレームワーク
が必要であり、いずれも個人でできる範疇からは、時間的にも能力的にもかけ離れていました。
そのタイミングで、国際共同研究の機会に恵まれたのは端的によって奇跡でした。脳モデルは成果創出加速から、身体モデルはNRPから提供されました。さらに、研究室の優秀な学生諸君に恵まれたのも奇跡でした。山田さん (当時B4, 現東大院) は精密にNRPを調査してくれて、身体モデルを思い通りに動かせるようになりました。大村さん (当時M2) はrosbridgeをC++から使えるようにしてくれました。「富岳」と研究室のPCをROSでつないで動かすのは平山さん (当時M2) が可能であることを実証してくれて、最後に國吉さん (M2) が全てを統合してくれました。
ですので、この論文の成果は、もはや私の手から離れたところで得られたものであると言えます。
そして、この論文が出たことによって、脳全体の学習アルゴリズムとしての階層強化学習の研究を始めることができるようになりました。特に、栗山さん (D2) の小脳強化学習スパイキングネットワークモデルがその中核になります。前岡さん (当時M2) は脳モデルをGPU版に書き直してくれたので、規模を小さくすればリアルタイムで動作します。松本さん (M1) は体性感覚野のモデルを今実装してくれています。これらが収斂すれば、リアルタイムで動作する脳型階層強化学習器が実現され、エッジ向けAIとして提供できるようになります。再び、ここでも学生諸君の成果が中核に据えられます。学生諸君が研究室の研究をリードするような体制に進化したと言えるでしょう。
そしてもう一つ。ポスト「京」萌芽や成果創出加速、さらには教科書の執筆を通して、シングルコンパートメントモデルではスパコンの性能を十二分に引き出せないという問題に真剣に取り組むようになりました。それも結局学生諸君が中心になり、今やっている「脳デジタルツイン」の研究につながるのですが、それについてはまたいつか。